Posts Tagged 'Ethernet-based In-Vehicle network'
-
April 18, 2022



ソフトウェアデファインド車両用イーサネットカメラブリッジ
マーベル、オートモーティブ・ビジネス・ユニット、マーケティング担当バイス・プレジデント、アミール・バー・ニヴ氏著
自動車の変革
Smart Car and Data Center-on-wheels are just some of the terms being used to define the exciting new waves of technology transforming the automotive industry and promising safer, greener self-driving cars and enhanced user experiences. Underpinning it all is a megatrend towards Software-defined Vehicles (SDV). SDV is not just a new automotive technology platform. It also enables a new business model for automotive OEMs. With a software-centric architecture, car makers will have an innovation platform to generate unprecedented streams of revenue from aftermarket services and new applications. For owners, the capability to receive over-the-air software updates for vehicles already on the road – as easily as smartphones are updated – means an automobile whose utility will no longer decline over time and driving experiences that can be continuously improved over time.
このブログは、SDVの将来を可能にするシステムの基本的な構成要素について説明する一連のブログの最初のものである。
SDVへの道はイーサネットで整備されている
A key technology to enable SDVs is a computing platform that is supported by an Ethernet-based In-Vehicle network (IVN). An Ethernet-based IVN provides the ability to reshape the traffic between every system in the car to help meet the requirements of new downloaded applications. To gain the full potential of Ethernet-based IVNs, the nodes within the car will need to “talk” Ethernet. This includes devices such as car sensors and cameras. In this blog, we discuss the characteristics and main components that will drive the creation of this advanced Ethernet-based IVN, which will enable this new era of SDV.
その前に、この新しいビジネスモデルの確約について話しましょう。 例えば、「自動車にどれだけの新しいアプリケーションが生まれ、誰がそれを使うのだろう?」と人々は問うかもしれない。 これはおそらく、Appleが最初のAppStoreを作成したときに尋ねられたのと同じ質問です。AppStoreは数十の新しいアプリから始まりましたが、もちろん後の広がり歴史が物語ってます。 私たちは間違いなくこのモデルから学ぶことができる。 さらに、これは単なるOEMだけの仕事ではない。 SDV車が道路を走るようになれば、OEMのために、スマートシティ、MaaS(Mobility as a Service)、ライドヘイリングなど、他のメガトレンドと連携したまったく新しい自動車アプリケーションの世界を開発する新しい企業の出現が予想される。
自動車革新の新時代
ここで、2025年から2030年(自動車業界では「すぐそこまで来ている」と考えられています)に早送りしてみることにする。より高いレベルの運転支援システム (ADAS) をサポートするように設計された新しい自動車には、20 ~ 30 個のセンサーが搭載されている (カメラ、レーダー、ライダーなど)。 これらのセンサーを利用できる2つの新しいアプリケーションの可能性を想像してみよう:
Application 1: “Catch the Car Scratcher” - How many times have we heard of, or even been in, this situation? Someone scratches your car in the parking lot or maliciously scratches your car with a car key. What if the car was able to capture the face of the person or license plate number of the car that caused the damage? Wouldn’t that be a cool feature an OEM could provide to the car owner on demand? If priced right, it most likely could become a popular application. The application could use the accelerometers, and potentially a microphone, to detect the noise of scratching, bumping or hitting the car. Once the car identifies the scratching or bumping, it would activate all of the cameras around the car. The car would then record the video streams into a central storage. This video could later be used by the owner as necessary to recover repair costs through insurance or the courts.
Application 2: “Break-in Attempt Recording” - In this next application, when the system detects a break-in attempt, all internal and external cameras record the video into central storage and immediately upload it to the cloud. This is done in case the car thief tries to tamper with the storage later. In parallel, the user gets a warning signal or alert by phone so they can watch the video streams or even connect to the sound system in the car and scare the thief with their own voice.
これらのシナリオについては、フォローアップ ブログでより包括的に検討しますが、これらは、イーサネット ベースのIVNが将来のソフトウェア デファインド カーで実現できる可能性のある多くの高価値の車載アプリの2つの例にすぎない。
ソフトウェア定義ネットワーク
イーサネットネットワーク標準は、セキュリティ脅威の緩和など、実際のネットワークニーズに対応するために長年にわたって開発されてきた機能やソリューションの長いリストで構成されている。 イーサネットは2014年に自動車業界で初めて採用され、以来、自動車内の主要ネットワークとなっている。 車のプロセッサー、センサー、カメラ、その他のデバイスがイーサネット(Ethernet End-to-End)を介して互いに接続されれば、今後実現が約束されているSDVにおいては、車載ネットワークを再プログラムし、その主な特性を新しい高度なアプリケーションに適応させる能力を実現できる。 この機能は車載Software-Defined Networking、略して車載SDNと呼ばれる。
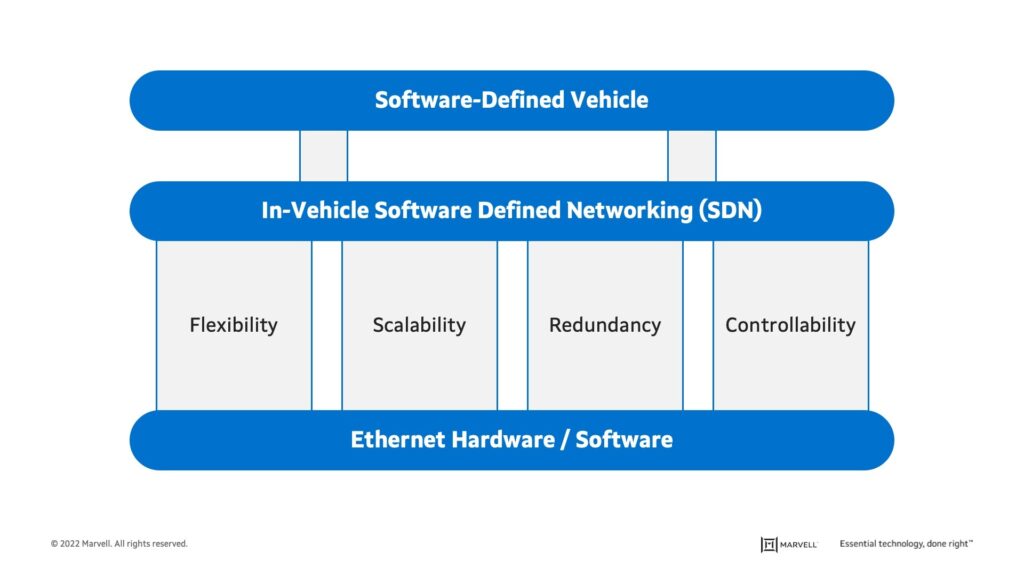
図1は、SDVを実現する車載SDNのビルディングブロックを示している。
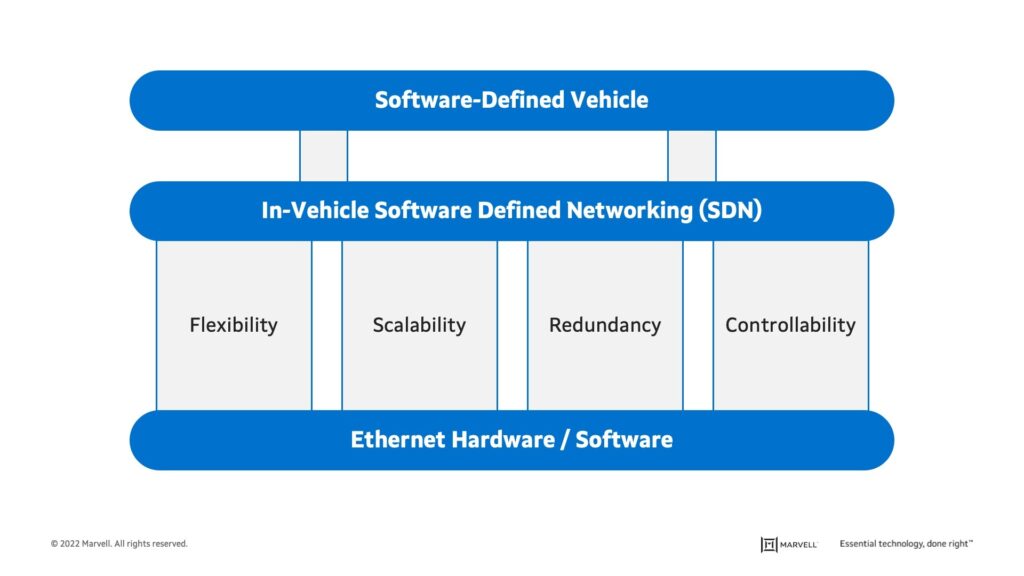
図1 - SDVのビルディングブロックとしてのイーサネットとSDN
イーサネットの特徴は、SDVにとって重要な4つの属性を可能にする: 柔軟性、拡張性、冗長性、制御性。
- Flexibility provides for the ability to change data flow in the network and share devices (like cameras and sensors) between domains, processors and other shared resources (e.g., storage).
- Scalability of both software and hardware is needed to support new applications and features. Software updates to the originally installed processors and ECUs usually require changes in the network’s routing of data and controls. Hardware can be also modified over time in the car, and in many cases, adaptations to the network may be required to support new speeds and Quality of Service (QoS), for the new hardware.
- Redundancy, not only in mission-critical processors but also in data paths between the devices, safeguards the network. Switching and multi-data paths can also assist load balancing in the backbone of the in-vehicle network.
- Controllability, diagnostic and real-time debugging of all links in the car provides real-time self-diagnosis and fault management, such as channel quality, link marginality/degradation, and EMC vulnerability, by leveraging of the Ethernet’s Operations, Administration, and Maintenance (OAM) protocol. With advanced, AI/ML based data processing, more effective prediction of network health is possible, enabling higher-level safety goals and significant economic benefits.
車載SDNは、SDVにおいてこれらの属性を変更し適応させる能力を提供するメカニズムである。SDNはアプリケーションプログラミングインターフェース(API)を使って、スイッチやブリッジのような基礎となるハードウェアインフラと通信し、ネットワーク内のトラフィックフローを規定する技術である。 車載SDNは制御プレーンとデータプレーンの分離を可能にし、車載ネットワークにおける高度なデータ転送メカニズムの領域にネットワークプログラマビリティをもたらす。
カメラとイーサネットエッジ
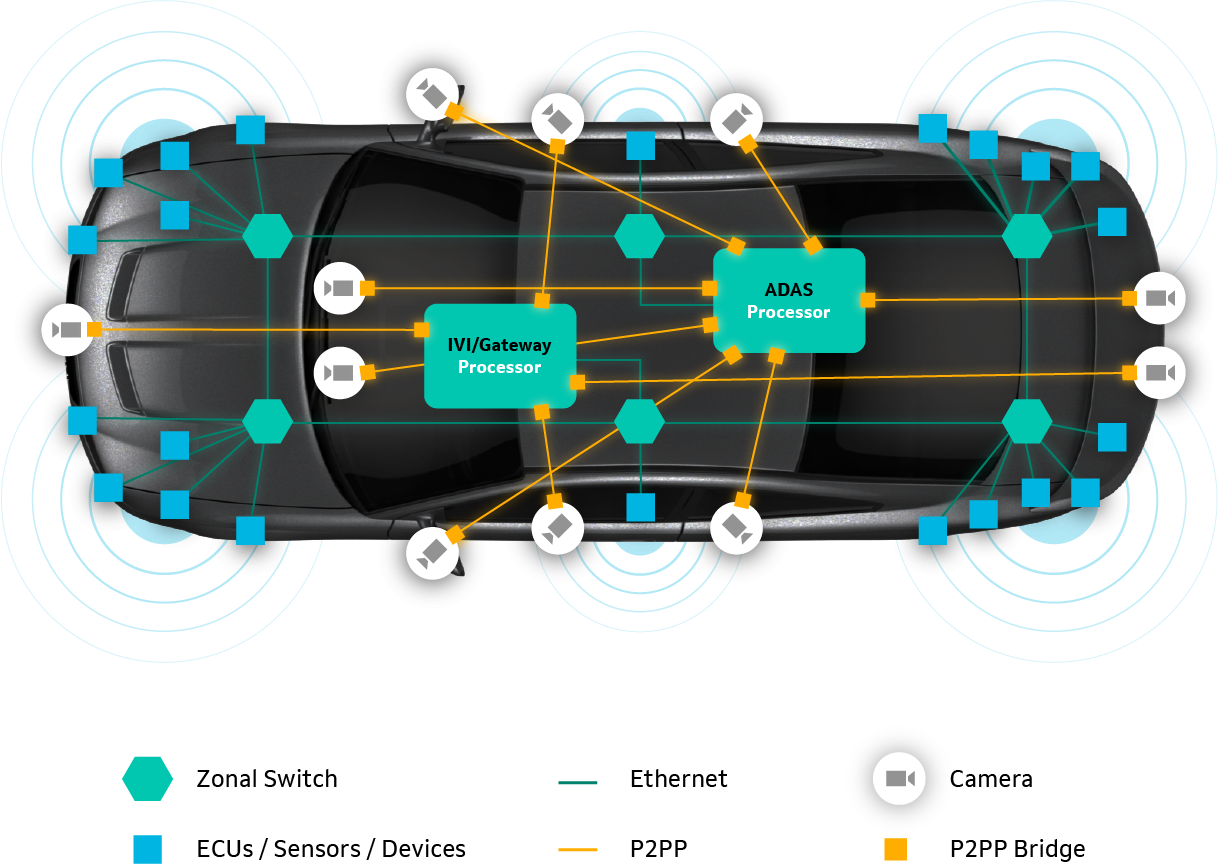
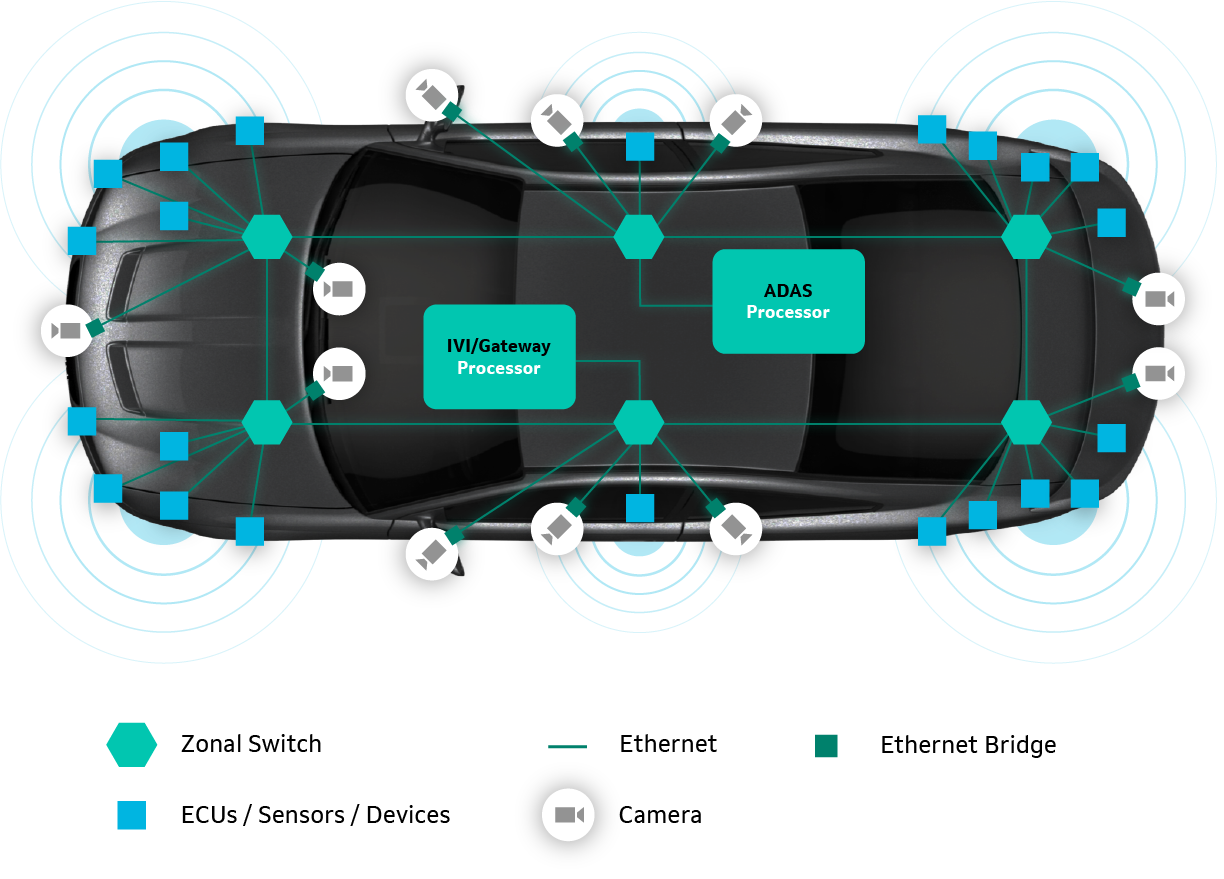
To realize the full capability of in-vehicle SDN, most devices in the car will need to be connected via Ethernet. In today’s advanced car architectures, the backbone of the high-speed links is all Ethernet. However, camera interfaces are still based on old proprietary point-to-point Low-Voltage Differential Signaling (LVDS) technology. Newer technologies (like MIPI’s A-PHY and ASA) are under development to replace LVDS, but these are still point-to-point solutions. In this blog we refer to all of these solutions as P2PP (Point-to-Point Protocol). In Figure 2, we show an example of a typical zonal car network with the focus on two domains that use the camera sensors: ADAS and Infotainment.
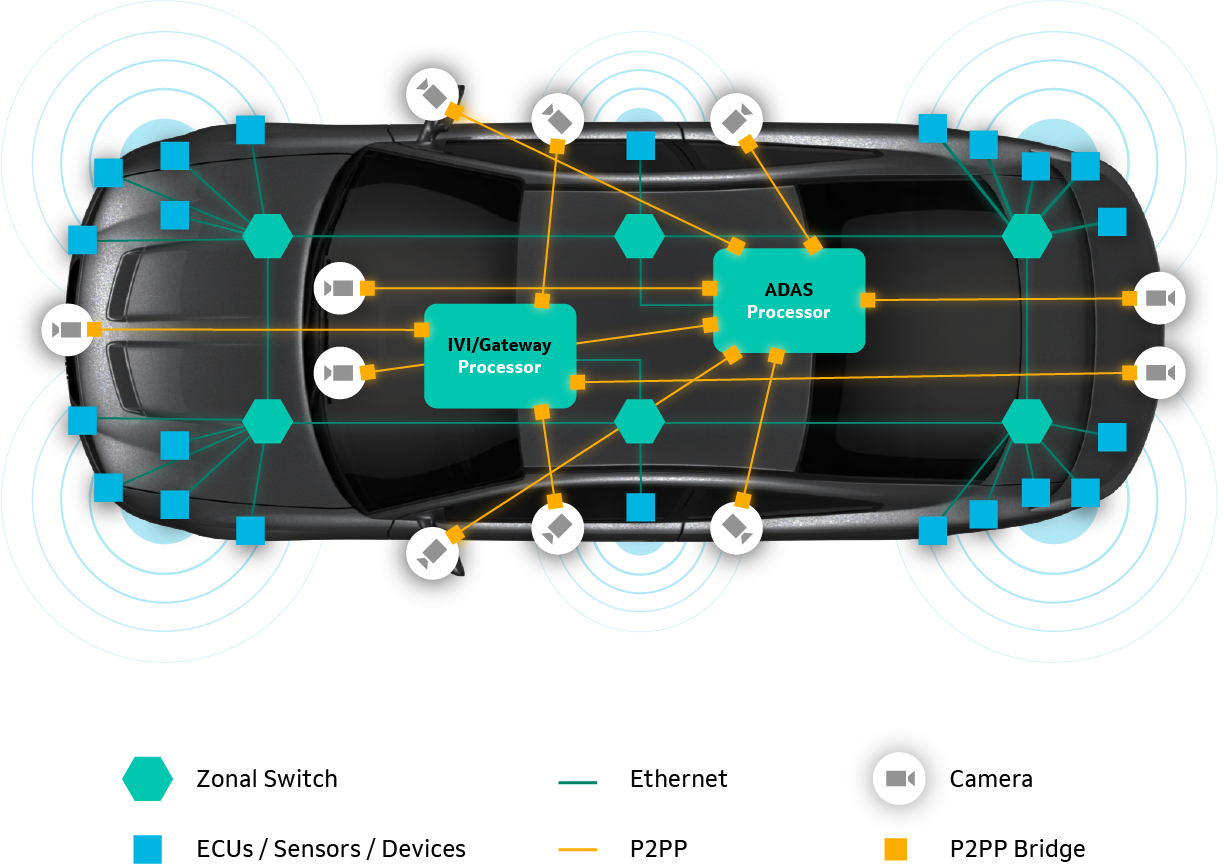
図2 - ポイントツーポイントのカメラリンクを持つゾーナルネットワークアーキテクチャ
ECU/センサー/デバイスの大半はゾーナルバックボーンを介して(その利点を活用して)接続されているが、カメラは依然としてプロセッサーに直接(ポイントツーポイント)接続されている。 カメラは2つのドメイン(ADASとIVI)間で単純な方法で共有することはできず、多くの場合、別々のボックスに入っている。 この融通性の無い接続には拡張性の余地がない。 カメラはプロセッサーに直接接続されており、このプロセッサーに異常が発生するとカメラとの接続が失われる可能性があるため、冗長性も非常に限られている。
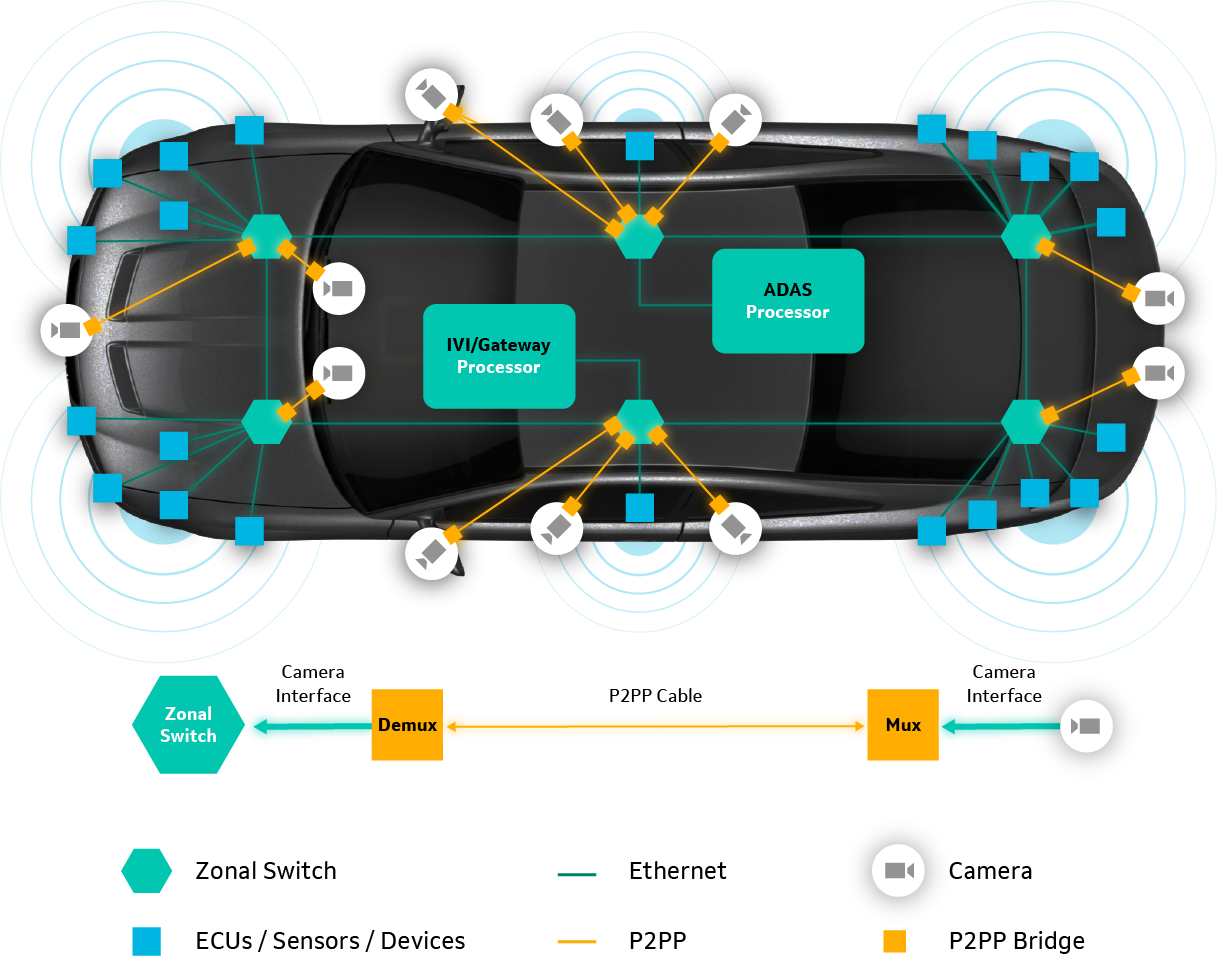
この「解決策」として考えられるのは、図3に示すように、カメラをP2PPP経由でゾーナルスイッチに接続することである。
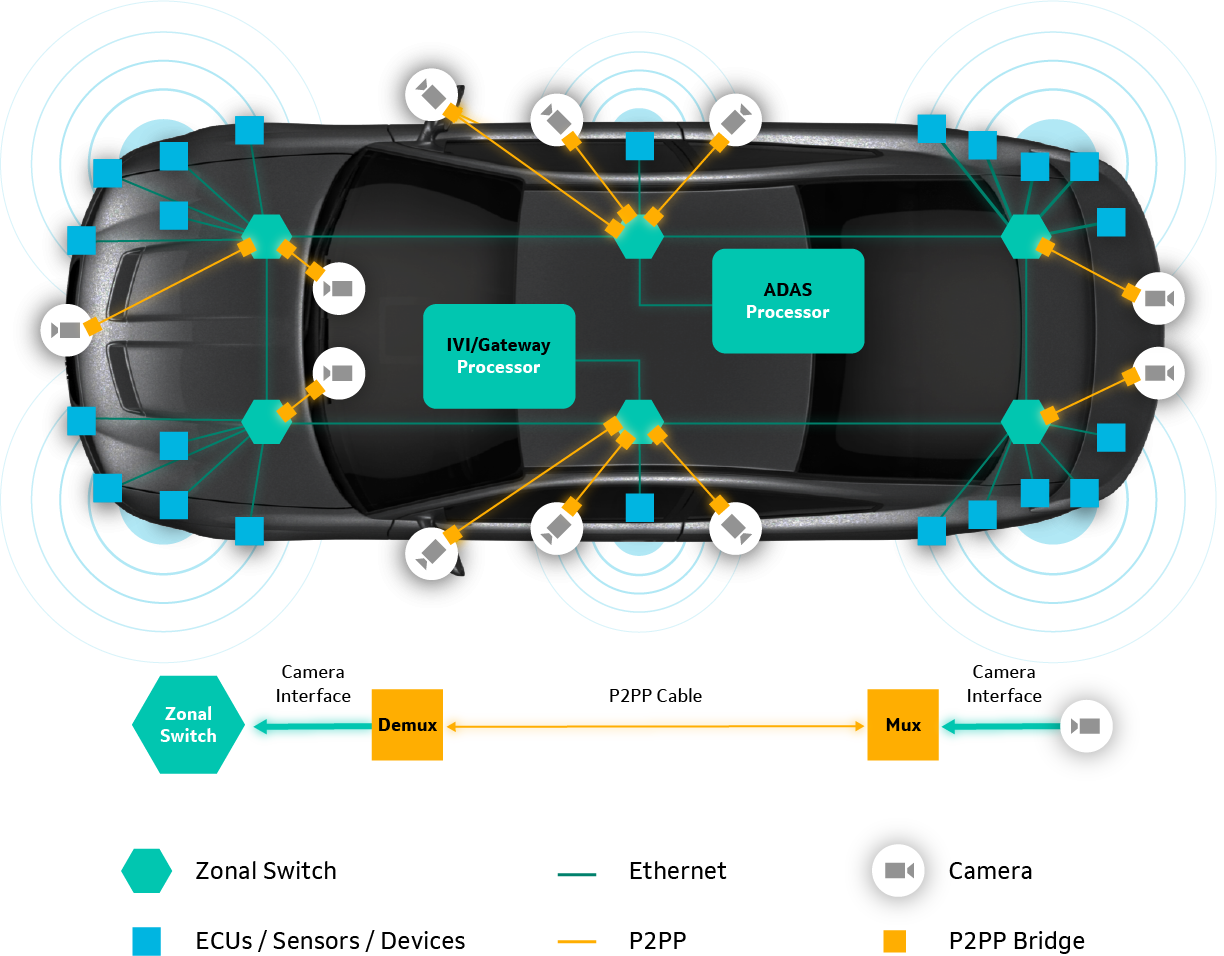
図3 - ゾーナルスイッチへのポイントツーポイントのカメラリンクを持つゾーナルネットワークアーキテクチャ
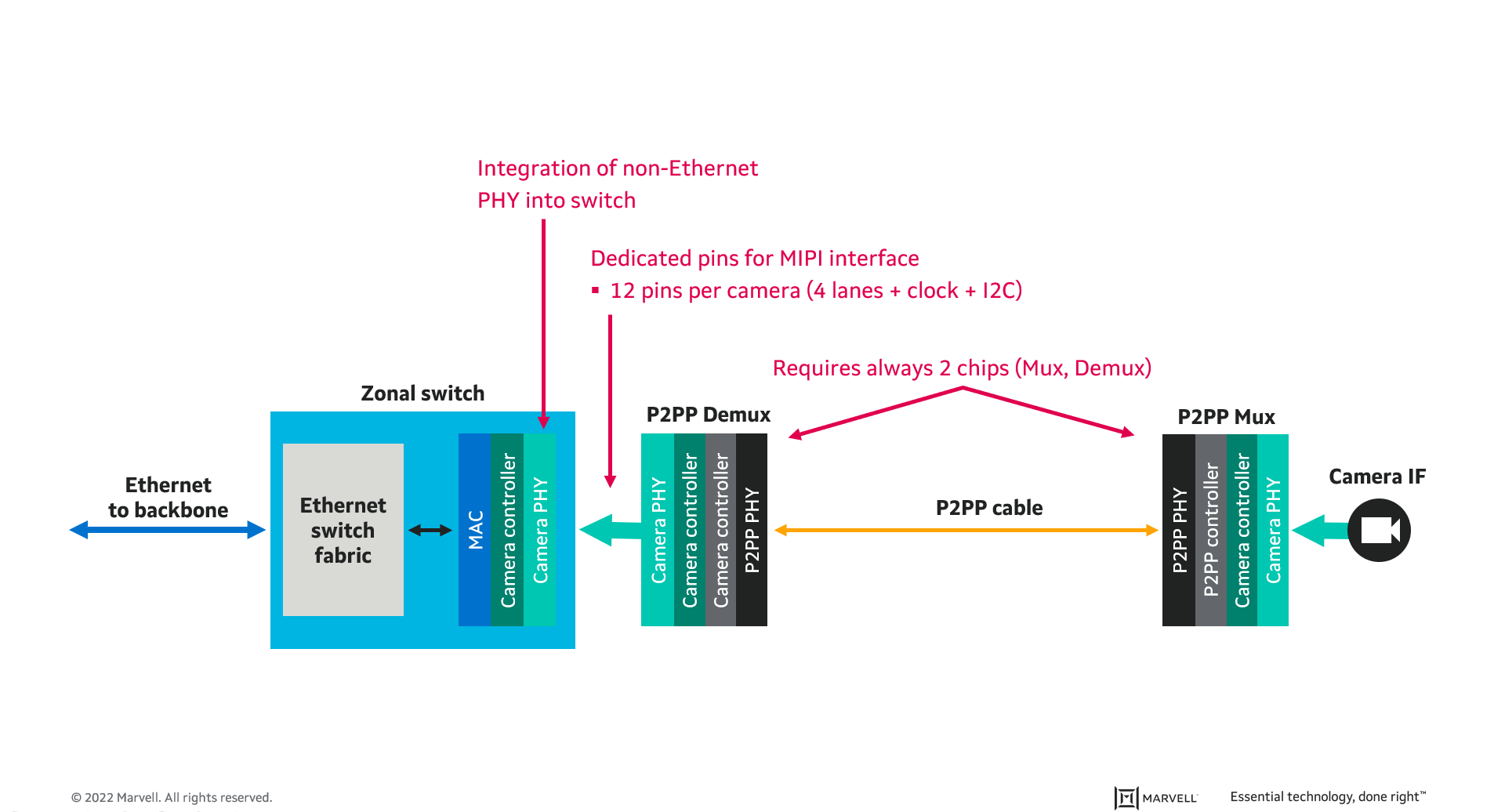
This proposal solves only a few of the problems mentioned above but comes at a high cost. To support this configuration the system always needs a dedicated Demux chip, as showed in Figure 4, that converts the P2PP back to camera interface. In addition, to support this configuration, the Zonal switches need a dedicated video interface, like MIPI D-PHY. This interface requires 12 pins per camera (4 pairs for data, 1 pair for clock and 1 pair for control (I2C or SPI)). This adds complexity and many dedicated pins which increases system cost. Another option is to use an external Demux-switch (on top of the Zonal switch) to aggregate multiple P2PP lanes, which is expensive.
また、これらのプロトコルをゾーナル・スイッチに統合することは、スイッチにイーサネット以外の専用ポートを必要とするため、可能性は極めて低い。 さらに、独自技術や成熟していない新技術をスイッチやSoCに統合することは誰も考えないだろう。
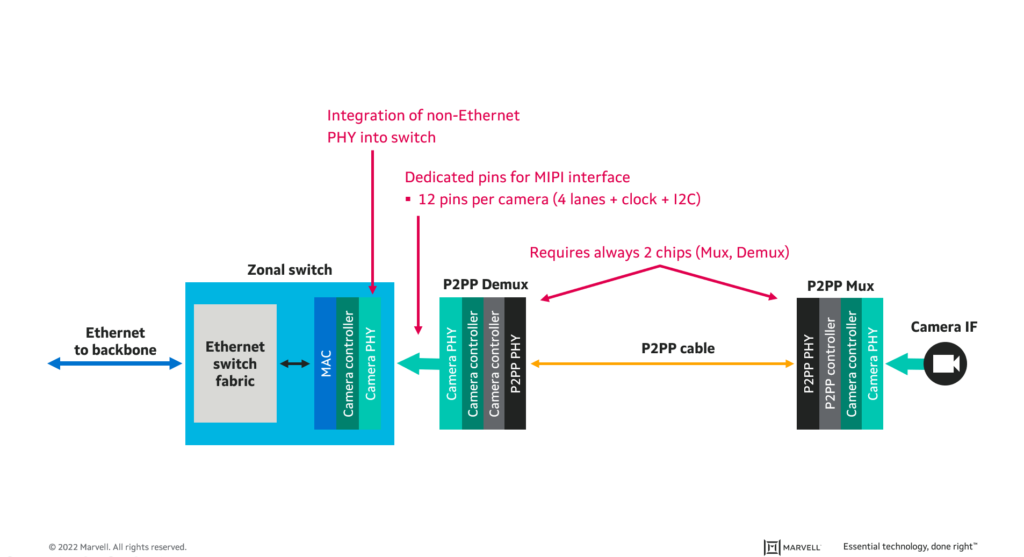
図4 - ゾーナルアーキテクチャのカメラP2PPブリッジ
次に、制御性、診断、リアルタイムのデバッグだが、P2PPリンク上では、イーサネット上と同じシンプルで標準的な方法では動作しない。 このため、車両内のすべてのイーサネットベースのECU、デバイス、センサーへのアクセス、モニタリング、デバッグに使用される既存のイーサネットベースのSWユーティリティの活用が制限される。
イーサネットカメラブリッジ
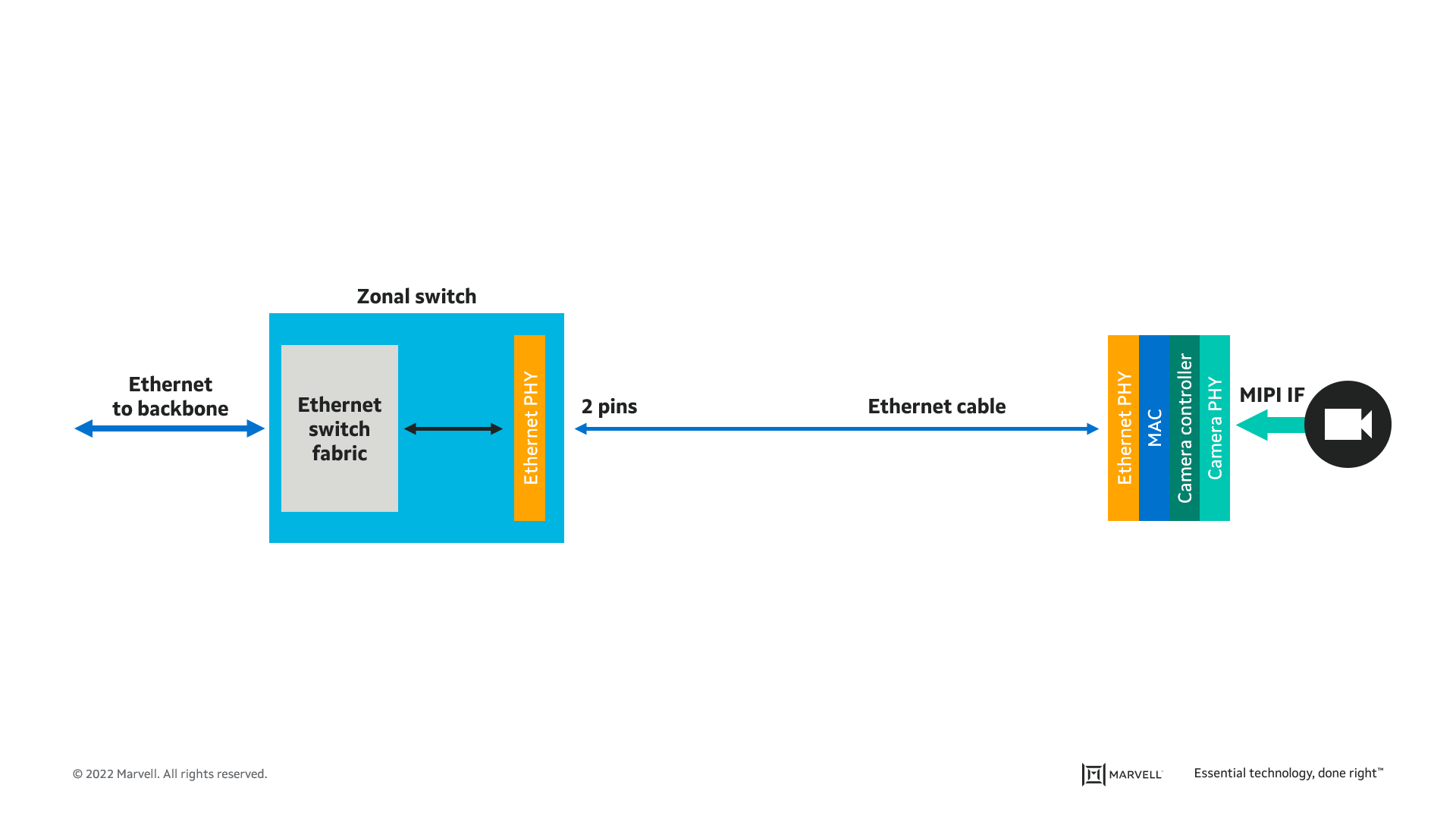
The right solution for all of these issues is to convert the camera-video to Ethernet – at the edge. A simple bridge device that connects to the camera module and encapsulates the video over Ethernet packets is all it takes, as shown in Figure 5.
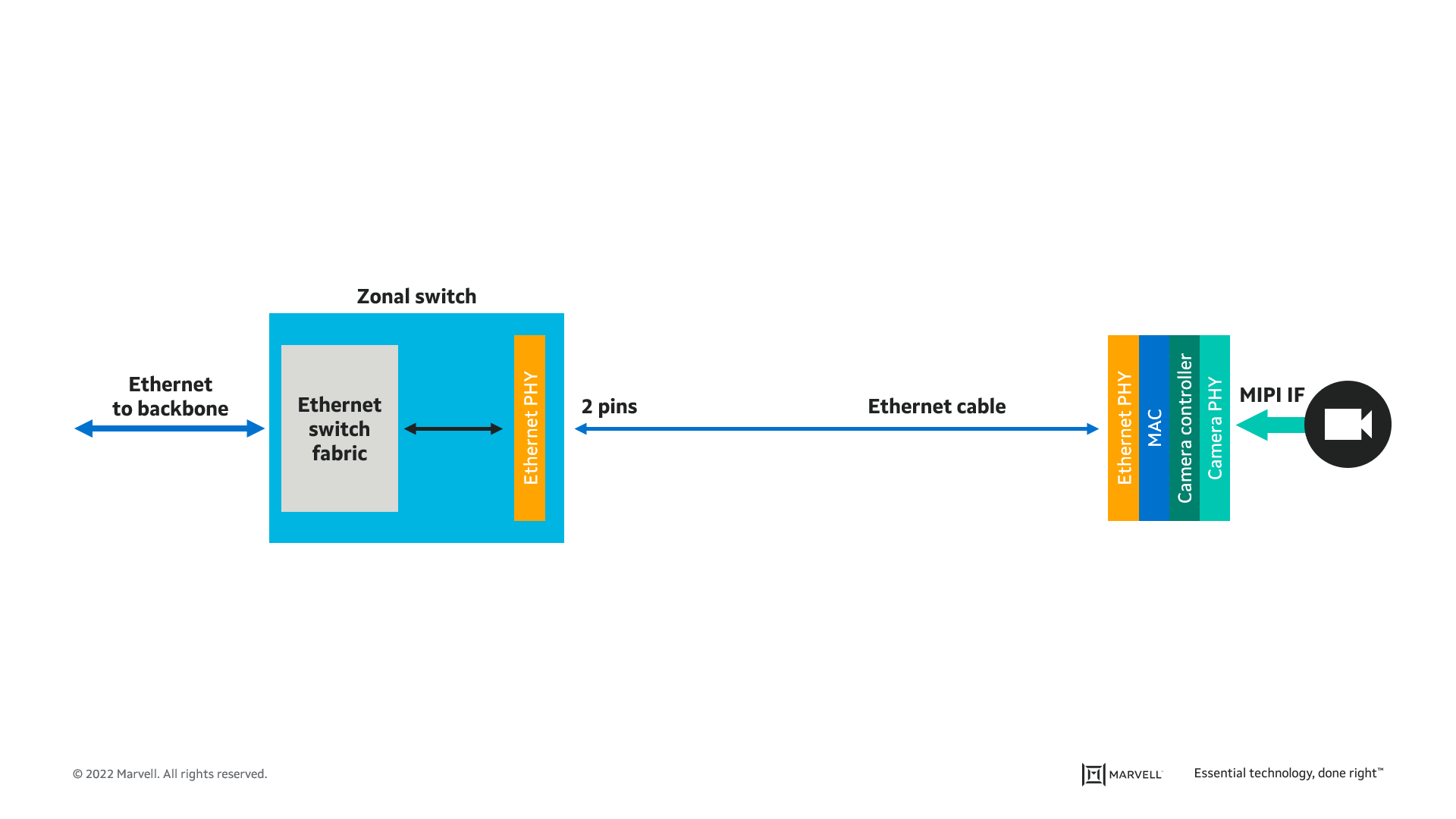
図5 - ゾーナルアーキテクチャーのイーサネットカメラブリッジ
車載イーサネットネットワークはレイヤー2(L2)ベースであるため、イーサネット経由のカメラ映像のカプセル化には、ブリッジデバイスでは単純なハードコード(SWなしという意味)のMACブロックにて処理可能です。 図6は、このようなブリッジデバイスを利用したネットワークを示している。
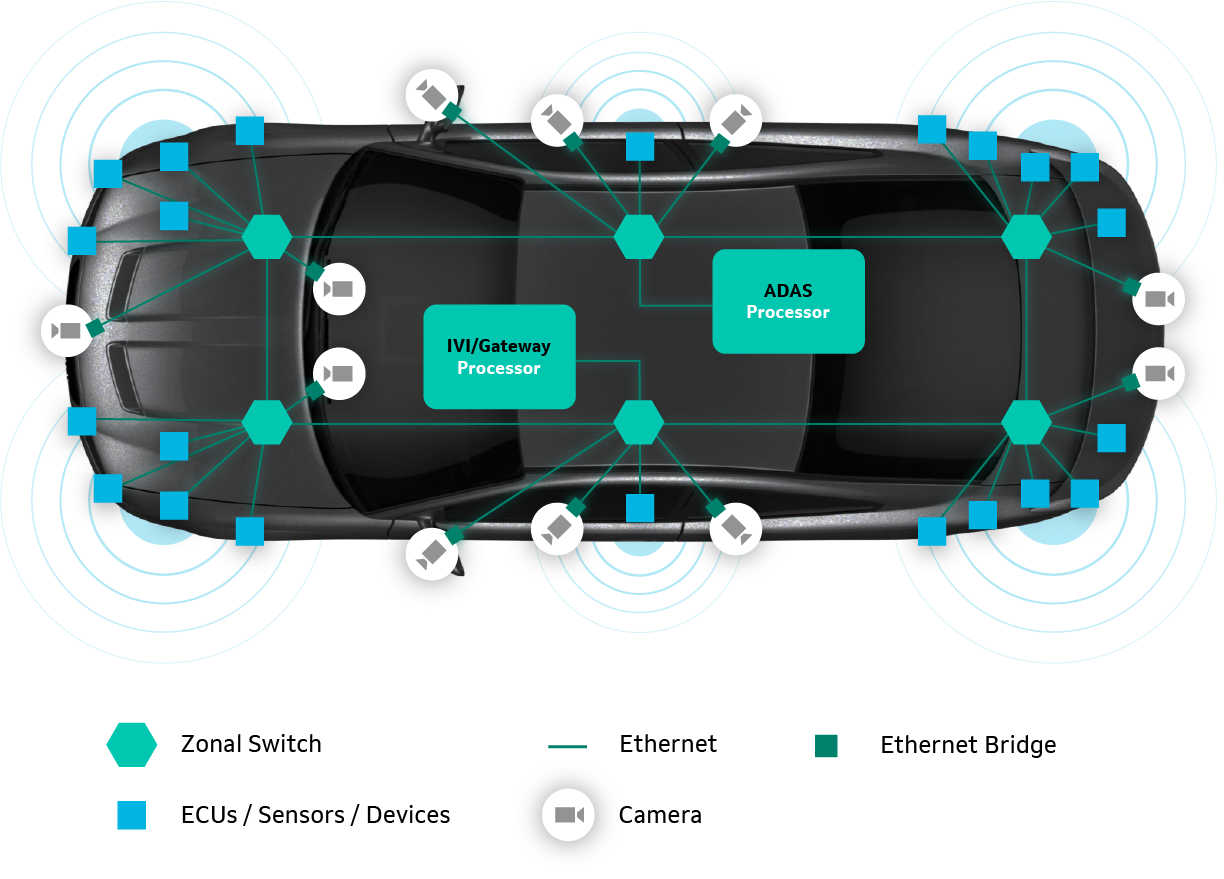
図6 - イーサネットEnd-to-Endによるゾーンアーキテクチャ
イーサネットカメラブリッジの最大の利点は、イーサネット規格の堅牢性と成熟度を活用できることである。 イーサネットブリッジPHYにとって、それは、ケーブル、コネクタ、テスト設備(コンプライアンス、相互運用性、EMCなど)の非常に強力なエコシステムとともに、長年にわたって自動車業界で受け入れられてきた実績のある技術(2.5G/5G/10GBASE-T1、そして間もなく25GBASE-T1)を意味する。
しかし、これは氷山の一角にすぎない。 カメラインターフェースの基礎技術がイーサネットになると、これらのリンクは自動的に次のような他のすべてのIEEEイーサネット規格にアクセスできるようになる。
- スイッチングと仮想化 - IEEE 802.1
- セキュリティ - 認証と暗号化 - IEEE 802.1AE MACsec
- ネットワーク経由の時刻同期 - IEEE PTP 1588
- パワーオーバーケーブル - IEEE PoDL 802.3bu
- オーディオ/ビデオブリッジング - IEEE 802.1 AVB/TSN
- エネルギー効率の高いイーサネットプロトコルを使用した非対称伝送 - IEEE 802.3az
- すべてのトポロジをサポート: メッシュ、スター、リング、デイジーチェーン、ポイントツーポイント
車載ネットワーク向けのこれらの重要な機能については、以前のマーベルブログ「車載アプリケーション向けのイーサネットの高度な機能 」で取り上げている。
イーサネットカメラブリッジ付きイーサネットエンドツーエンドは、信頼性の高いソフトウェアデファインドカーの動作に必要な次の4つの主要属性(図1に記載)をすべてサポートしている。 カメラはドメイン間で簡単に共有できる。 ソフトウェアとハードウェアは独立して簡単に変更でき、カメラやセンサーに至るまで拡張できる。 ゾーナルスイッチでは特別なビデオインターフェイスが必要ない。カメラのイーサネットリンクはスイッチの標準イーサネットポートに接続され、冗長性のために複数の経路でルーティングできる。 このアプローチでは、他の車載ネットワークで使用されている標準的なイーサネットユーティリティを使用して、カメラリンクの制御性、診断、リアルタイムデバッグを完全にサポートする。
今後の予定は? カメラの解像度とリフレッシュレートが上がるにつれて、カメラリンクは将来的に10Gbpsを超えるデータレートをサポートする必要がある。 このトレンドをサポートするために、IEEE P802.3cy Greater than 10 Gb/s Electrical Automotive Ethernet PHY Task Forceは、すでに25Gbps車載PHYの標準を定義している最中である。 従って、車載バックボーンだけでなく、最大25GbpsのCamera Ethernetブリッジも将来的には必至であり、それに伴い、さらに魅力的なスマートカーアプリが多数登場することが予想される。
自動車向けマーベル製品ロードマップ
To help support these new initiatives in automotive technology application and design, Marvell announced the industry’s first multi-gig Ethernet camera bridge solution.
これらの発表が示すように、マーベルは車載アプリケーション向けネットワーキングおよびコンピュートソリューションの革新を推進し続けています。 マーベルの車載用ロードマップには、新しいアプリケーションを可能にするために、新しいシステム構成の無線アップロードを可能にするTrusted Boot®機能をサポートするマネージドイーサネットスイッチが含まれている。 マーベルの車載向けカスタムコンピュート製品は、先進的なプロセスノードで設計され、高性能マルチコアプロセッサ、エンドツーエンドのセキュリティ、高速PHYおよびSerDes技術などのマーベルのIPポートフォリオを活用している。
To learn more about how Marvell is committed to enabling smarter, safer and greener vehicles with its innovative, end-to-end portfolio of Brightlane™ automotive solutions, check out: https://www.marvell.com/products/automotive.html.
The next blogs in this series will discuss some of the characteristics of SDN-on-wheels, central compute in future vehicles, security structure for vehicle-to-cloud connectivity, in-vehicle-network for infotainment and other exciting developments that enable the future of software-defined vehicle.