
2022年11月16日
The Right Stuff: 自動車コネクティビティの過去と未来の歴史
マーベル、オートモーティブ・ビジネス・ユニット、マーケティング担当バイスプレジデント、アミール・バー・ニヴ、およびマーベル、ソリューション・マーケティング担当シニアディレクター、マーク・デイビス著
ブログ「Back to the Future - 10Gbpsの速度で動作する車載ネットワーク 」では、ゾーナルアーキテクチャの利点と優位性、そしてOEMが次世代自動車にこれを採用する理由について述べた。 ゾーナルアーキテクチャーの最大の利点のひとつは、ケーブルハーネスの複雑さ、コスト、重量を軽減できることである。 別のブログ「ソフトウェアデファインド車両向けEthernet Camera Bridge」( )では、ソフトウェアデファインド車両について、また、エンドツーエンドでイーサネットを使用する車両を実現する方法について説明した。
近い将来、車内のほとんどの機器はゾーンスイッチで接続されるようになるだろうが、カメラは例外である。 低電圧差動信号(LVDS)、MaximのGMSL、TIのFPD-Linkなどの独自のネットワーキングプロトコルを使用して、ポイントツーポイントプロトコル(P2PPP)リンクでプロセッサに接続する。
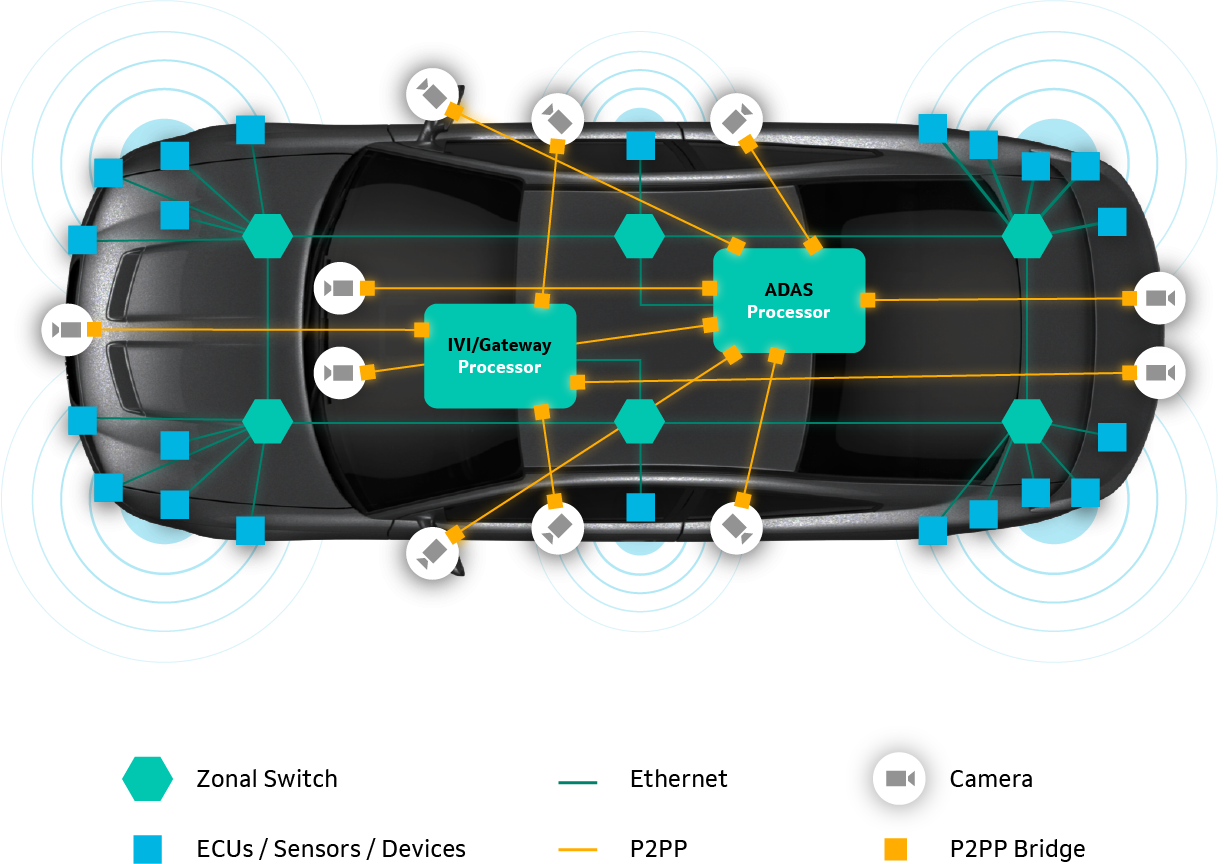
車載機器のほとんどが車載イーサネットで接続されるのであれば、なぜOEMはカメラのインターフェイスに独自の技術を採用したのだろうか? その答えは、車載ネットワークの歴史と車載イーサネット PHY の進化に関連している。
では、少し歴史を振り返ってみよう。
(歴史を飛ばしてすぐに現代にジャンプしたい場合は、ここをクリック 、またはスクロールダウンして "The Need for Speed "へ)
1986: 車のCANはもっと良くなる
1980年代初頭までに、自動車の新しい設計要件は、従来のハードワイヤードされた電子機器の能力を上回っていた。 Robert Bosch Gmbhのエンジニアは、電子制御ユニット(ECU)とサブシステムが互いに通信し、ソフトウェアで新機能を導入できるようにする新しいシリアルバスシステムの開発に取り組んだ。
Bosch、学界、産業界のエンジニアが1986年にコントローラーエリアネットワーク(CAN)プロトコルを発表し、1987年にはインテルとフィリップスが最初のCANコントローラー半導体チップを発表した。
Daimlerは1992年に初めてCANを導入し、CANバスはほぼ一般的に使用されるようになり、1996年以降、米国で販売されるすべての自動車と小型トラックに義務付けられている車載診断 (OBD) -II 車両診断規格で使用される5つのプロトコルの1つとなっている。
CANバスは、その能力と堅牢性から、自動車メーカーからは、自動車のすべてのコンポーネントに実装するにはコストがかかりすぎると見なされるようになった。
2002: LIN またはもっと安い方法があるはずだ
CANバス機能を必要としないコンポーネント、つまりパワー ウィンドウ、電動サンルーフ、エアコン制御などの快適機能のCAN主導のネットワーク コストを削減するために、ヨーロッパの自動車メーカーはさまざまなシリアル通信テクノロジを利用し始めましたが、これが互換性の問題を引き起こしました。 これがシリアルネットワークプロトコルLIN(Local Interconnect Network)の開発に拍車をかけた。
1998年に設立されたLINコンソーシアムは、2002年に新しいLIN仕様を発表し、2003年には2.0バージョンを発表した。
LINバスは、安価なシリアル通信プロトコルであり、低コストが必須で、必要な要件が少なく、速度/帯域幅が重要でない場合には、CANバスの代替となる。 一般的には、車両の性能や安全性に重要でないサブシステムで使用される。 そのため、CANネットワークを補完し、階層的な車載ネットワークを実現する。
LINバスは、ワイパー、方向指示器、シートモーター、ミラー、ドアロックなどのメカトロニクスノードで一般的に使用されている。
1998: カーステレオにMOSTを活用する方法
ジャネット・ジャクソンが1998年にTogether Againで、再びヒットチャートを賑わせた頃には、オーディオCDがアナログストレージに取って代わり、ナビゲーションや携帯電話に対する消費者の関心が高まりつつあったため、自動車業界はマルチメディアネットワーク規格の策定を遅らせていた。 この年、MOSTは、共通のマルチメディアネットワークプロトコルを定義し、採用することに着手した。 彼らの努力の結果、MOST(Media Oriented Systems Transport)技術は、自動車にマルチメディアネットワークを実装するための世界標準として登場した。
シリアルMOSTバスは、同期データ通信 を使用し、プラスチック光ファイバー(POF) または電気導体 を介してオーディオ、ビデオ、音声およびデータ信号を伝送するもので、世界中のほぼすべての自動車ブランドで使用されている。 最初の実装であるMOST25では、最大15チャンネルの非圧縮ステレオオーディオチャンネルをCD品質のサウンドでサポートすることができた。 2001年にBMWが光伝送を用いたMOST25を最初に導入した。
2007年に発表されたMOST150は、高度な機能と強化された帯域幅を備え、ビデオを含むあらゆる形態のインフォテインメントデータを自動車全体に伝送できる多重ネットワークインフラを実現する。 MOST150は2012年にアウディが光伝送で初めて導入し、ホンダが同軸伝送で導入した。
MOST は広く使用されていますが、車両全体にわたる高帯域幅のインフォテインメントの需要が増大するにつれて、その重要性は低下している。
2000: FlexRayが21st 世紀の自動車に挑む
自動車メーカーが安全性、快適性、性能、環境への影響の基準を引き上げ続けるにつれて、機能が純粋に電気的で機械的なフォールバックがなく、高度な制御と安全システムは明らかな標的の機能を備えた「X-by-wire」アプリケーションに関心を持ち始めました。
FlexRayコンソーシアムは、このようなハイエンドアプリケーションで使用される広帯域で耐障害性の高い車載ネットワーク通信プロトコルの開発に着手した。 それは、10 Mbit/sのデータ レート (CANの1 Mbit/sと比較して) と 2 つの利用可能な独立したデータ チャネルのおかげでCANよりも高いフォールト トレランスの可能性を備えたプロトコルで、まさにそれを実現した。 また、信頼性の高い高速制御アプリケーションに必要な数多くの機能も搭載されている。
ご想像のとおり、FlexRay プロトコルは CAN よりも実装にコストがかかります。 そのため、プロトコル階層の一部として動作し、ドライブバイワイヤ、アクティブサスペンション、アダプティブクルーズコントロールなどの高性能パワートレインおよび安全アプリケーションに広く使用されています。
FlexRay 3.0の完成後、FlexRayコンソーシアムはその役目を終えたとみなし、2009年に解散した。 FlexRayプロトコルは現在、一連のISO規格(ISO 17458-1からISO 17458-5)で規定されている。
FlexRay は広く使用されているが、一部の自動車メーカーは、同じタイミング要件を満たす他の車載ネットワーキング テクノロジを選択している。
イーサネット
イーサネットは、変わった方法で自動車に導入された。 2004年に、BMWは2008年モデルから、外部との単一の診断およびプログラミングインターフェースとして機能するセントラルゲートウェイECUを導入することを決定した。 外部テスターは、OBDコネクターを経由して、車両に搭載された数十個のECUのひとつひとつを最新のソフトウェアでフラッシュするものだった。
問題は? アップデートのたびに1ギガバイトのファイルをフラッシュする必要がある。 同社が推奨する高速CAN(HS CAN)プロトコルを使用すると、このプロセスには16時間かかる。 アップロード時間が15分必要な工場とディーラーの両方には明らかに不向きだった。 新しいアプローチが必要だった。
MOST、FlexRay、USB、FireWireなど、あらゆるものがテーブルに並んだが、どれも不十分だった。 その答えは、100BASE-TXイーサネットだった。
イーサネットは、BMW独自のソフトウェア・アップロード・アプリケーションでは、ほぼ既製品に近い形で使用可能であったが、車両の走行中に使用される他のアプリケーションでは、シールドされていないケーブルを使用しながら、電磁放射に対応するための改造が必要であった。 OPENアライアンスはこの問題に取り組むために結成され、その結果、最初の自動車用イーサネット規格が誕生した: 100BASE-T1、またはIEEE 802.3bw。
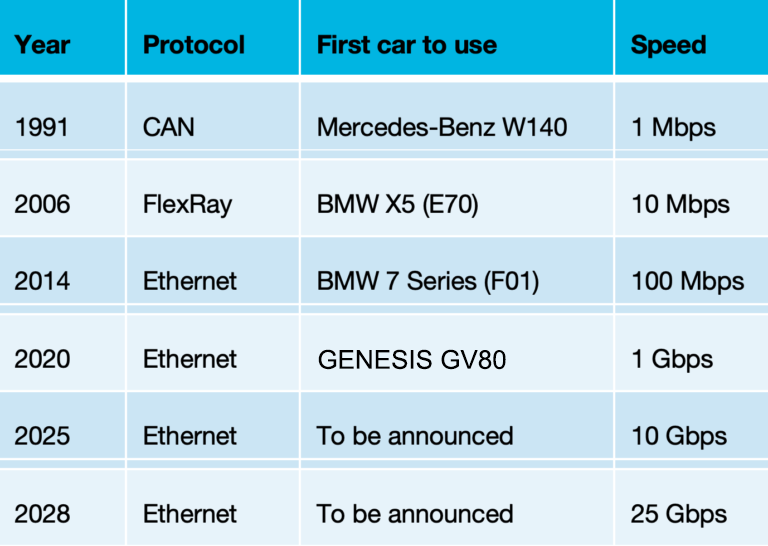
BMWは2014年、7シリーズのサラウンド・ビュー・システム(SVS)の一部として100Mbpsイーサネットを初めて導入した。 他のアプリケーションもすぐに追随し、まずはインフォテインメント領域でMOSTを置き換えた。
1000BASE-T1(1Gbps)を皮切りに、車載イーサネットの標準規格が追加され、いずれもIEEEの後援の下で開発されている。 IEEEは、2.5Gbps、5Gbps、10Gbpsの車載イーサネットの新規格を策定した。 イーサネットは10Gbpsのデータレートで、自律走行に不可欠なカメラからの非圧縮ビデオを配信することができる。
25Gbps車載イーサネットの最新規格(802.3cy)は、2023年半ばまでに最終決定される見込みで、車載カメラの将来の解像度と速度をサポートできるようになる。
スピードの必要性
市販車初のカメラは、日本市場限定の1991年型トヨタ・ソアラのリアスポイラーに搭載された。 バックカメラ技術を搭載した車両が米国で発売されるまでには、さらに11年の歳月が必要だった--2002年のインフィニティQ45セダンである。 これらは、アナログ信号を使用してCCDセンサーからダッシュボードの画面に低解像度の画像を転送するアナログカメラだった。
次の大きな一歩は、2010年代半ばに初めてバックミラーに導入された高解像度の車載デジタルカメラで、車をバックで操作するドライバーの死角を減らすために導入された。 これらのカメラや他の外向きカメラのデータ速度は700Mbpsから始まり、すぐに1Gbpsを超えた。
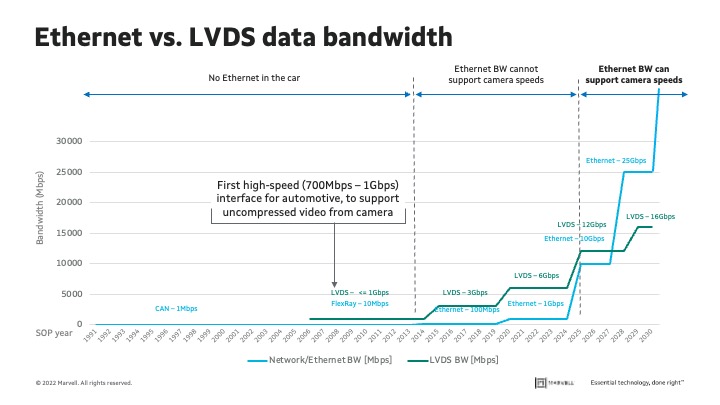
下表に示すように、車載イーサネット PHY はカメラリンク速度要求をサポートできなかった。 これらの要件は、LVDS技術をベースとするTexas Instrumentsのフラットパネルディスプレイリンク(FPD-Link)や、後のマキシムのギガビットマルチメディアシリアルリンク(GMSL)といった独自技術によって満たされた。 TIの技術は、2006年にFPD-Link IIという形で初めて普及し、約1Gbpsの速度で圧縮映像を伝送した。 現在、FPD-Link IIIは6Gbpsの速度をサポートしており、TIはさらに高速のデバイスをサンプル出荷している。
下図は、最新の車載イーサネット開発、LVDS技術の進歩を含む、車載ネットワークのデータレートの進化を示している。
車載イーサネットは脱出速度に達することができる
車載イーサネットPHY 速度は2.5、5、10Gbps(将来的には25Gbps)で、イーサネットはあらゆる車載カメラリンクに必要なデータレートをサポートできるようになった。 マーベルは、これらの要件を満たすために、イーサネットカメラブリッジ製品の新しい製品ライン を開発し、下図に示すように、これらのアプリケーションにおける独自技術の必要性を排除した。
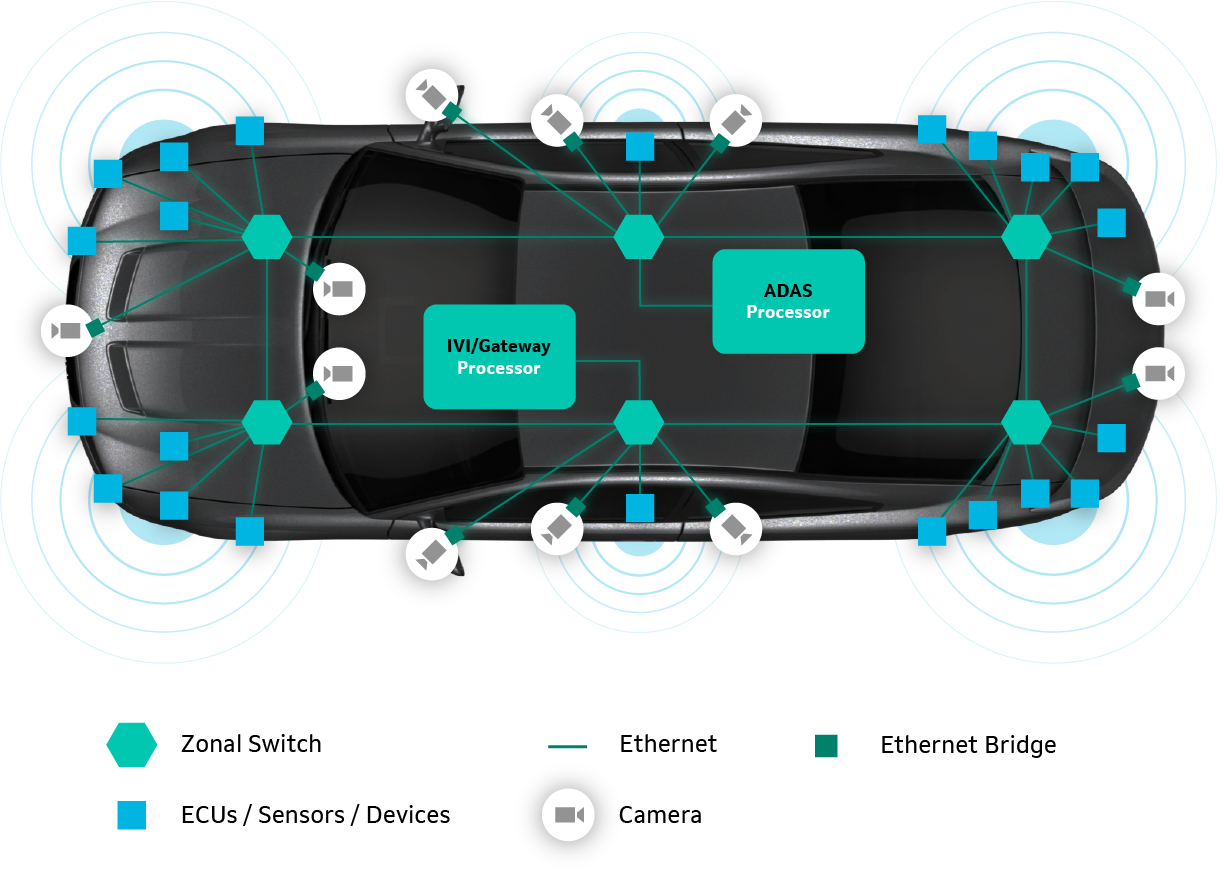
Ethernet Cameraブリッジの最大の利点は、堅牢で成熟したイーサネット規格に基づいていることです。 カメラブリッジで使用されるイーサネットPHYは、実績のある技術(2.5G/5G/10GBASE-T1、間もなく25GBASE-T1)であり、ケーブル、コネクター、テスト設備(コンプライアンス、相互運用性、EMCなど)のエコシステムが充実しており、長年にわたり自動車業界で広く受け入れられている。
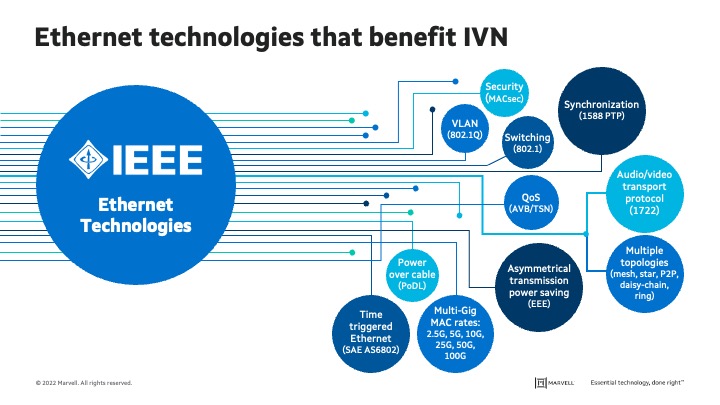
しかし、それだけではない。 イーサネットを基礎技術として、これらのカメラ・リンクは、以下のようなIEEEイーサネット規格の全範囲を利用することができる。
- IEEE 802.1: スイッチングと仮想化
- IEEE 802.1AE: MACsec認証と暗号化
- IEEE 1588 PTP: ネットワーク経由での時間同期
- IEEE 802.3bu PoDL: パワー・オーバー・ケーブル
- IEEE 802.1 AVB/TSN: オーディオ/ビデオ・ブリッジング
- IEEE 802.3az: エネルギー効率の高いイーサネットプロトコルを使用した非対称伝送
- すべてのトポロジをサポート: メッシュ、スター、リング、デイジーチェーン、ポイントツーポイント
車載ネットワーク向けのこれらの重要な機能については、以前のマーベルのブログ、Ethernet Advanced Features for Automotive Applications で取り上げている。
ロケットは打ち上げ準備完了
独自プロトコルは何十年もの間、車載ネットワーキングを特徴づけてきたが、それには理由がある。 車載イーサネットはそれを変えようとしている。 カメラは、その量、解像度、関連するデータ・レートの要件から、車載ネットワークの他の部分がイーサネットに移行しても、独自のアプローチに依存し続けてきた。
イーサネット速度の継続的な進歩により、車載カメラリンクのプロトコルが独自仕様の時代が終わりつつあることは明らかだ。 10年後までには、多くのOEMがゾーン・アーキテクチャからエンド・ツー・エンドのイーサネット・アーキテクチャに移行しており、イーサネット対応カメラは多くのソフトウェア定義車両機能のひとつに過ぎない。
主な参考文献
キルステン、マテウス(2021年)。 車載イーサネット。 ケーニヒスダー、トーマス ケンブリッジ
教授、 Ing. Andreas Grzemba 博士 (2011) MOST、オートモーティブ・マルチメディア・ネットワーク。 Franzis Verlag gmbH.
OPENアライアンス。「Openアライアンス」.opensig.org.
Peek, Jeff(2021年10月21日) 「後ろを見る: リアビューカメラは、あなたが思っているよりも古くから存在しています」. Hagerty Media
「CANテクノロジーの歴史」 オートメーションにおけるCAN(CiA)。
ISO 17458-5:2013: 道路運送車両 - FlexRay通信システム - Part 5: 電気物理層適合性試験仕様.
Tags: 車載イーサネット,車載イーサネットPHY,Ethernet Camera Bridge,ソフトウェアデファインド車両
